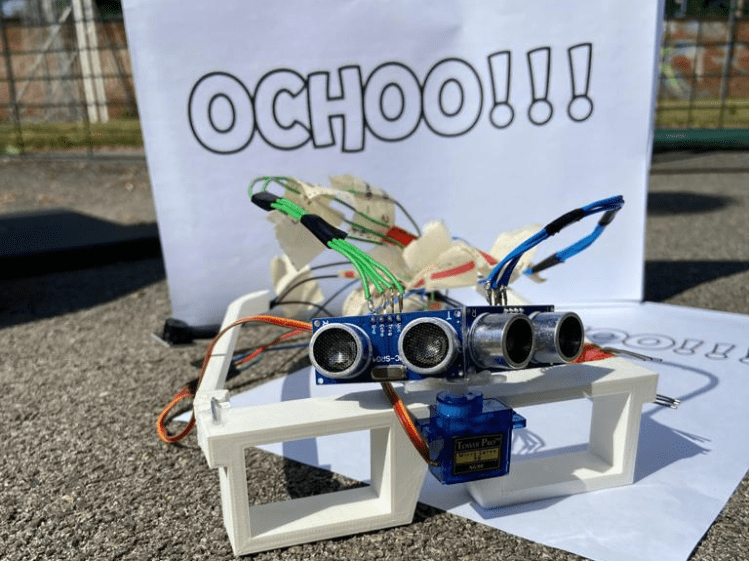
The project “ochoo” has designed a special pair of glasses with two ultrasonic sensors and a speaker that makes sounds if obstacles are near. We built this project with the aim of facilitating lives of blind people.
The structure of the glasses is 3d printed with a classic plastic filament. The two sensors are above a rotating servo motor so that it’s possible to have a 180-degree view of the surrounding obstacles.
Supplies:
- 1 arduino mini
- 1 power supply
- 2 ultrasonic sensors 1 servo motor
- 2 buzzers cables
- 3D printer filaments
Step 1: 3D Printing
The files above contain the 3d structure, split into the frame and the two rods to make the structure strong enough. It is recommended to print with a minimum quality of 0.1 mm and with an inll of at least 50%.
Step 2: Assembing
- Holes are drilled a few millimeters in diameter.
- The frame is assembled with the rods to support the glasses.
- If necessary wire and glue are used.
Step 3: Elettronic Part

Infrared sensor:
- Vcc – is connected to the 5V supply voltage.
- Trig – is the “Trigger” pin that must be activated to send the ultrasonic signal.
- Echo – is the pin that produces a pulse that is interrupted when the reflected signal from the object is received.
- GND – is connected to the reference potential, ground.
A 5 volt pulse of at least 10 μS (microseconds) duration is applied to the Trigger pin.
A train of 8 ultrasonic pulses at 40 KHz is generated and it travels away from the sensor into the surrounding air. More accurate measurements are obtained if the obstacle is in front of the sensor or in a hypothetical circular sector of 30°(15° on both sides with respect to the frontal direction).
The signal on the pin Echo meanwhile becomes high and starts recording the return time waiting for the reflected wave. If the impulse is not reflected, the signal on Echo returns low after 38 ms (milliseconds) and should be interpreted as absence of an obstacle. Remember the HC-SR04 (infrared sensor) is capable of measuring distances between 2 and 400 cm corresponding, for the maximum limit, to about 23 ms of signal duration on Echo.
Step 4: The Program
We programmed the Arduino using the C+ language for operating the system.
The ultrasonic sensors generate a pulse train. When the ultrasonic sound waves reach an obstacle they echo back and are detected by the microphone. At that point, a signal is sent to the buzzer to warn the user of the presence of an obstacle. Currently our prototype can detect obstacles at a distance of up to half a meter only.
Step 5:
You just have to try them!!!
And we’re waiting for your suggestions!!!
