SOFT ROBOTICS

- MEMBERS OF THE TEAM
Teammates: Luca Cristaudo, Clara Costantino, Rayen Trabelsi, Chiara Mascellani, Ilaria Manfredini, Giulia Cestaroli
Tutors: Francesco Bondesani, Gianluca Vinci
- INDEX
- INTRODUCTION AND DESCRIPTION OF THE PROJECT
The first thing you want to know about the project is that it was designed and created for rehabilitation purposes. Our project is based on the interaction between two gloves recreating a process called mirroring. The first glove composed by 3 actuators, connected to a pump, is the one which is able to make an hypothetical patient, open and close his right hand to pick up things. The second one (for the left hand) with 3 flex sensors on the fingers, would lead the mirroring process, activating the pump thanks to electronical support. The mirroring process consist in copying a movement from a limb and tranferring it to the other thanks to AI or robotics (in our case In fact).
In fact, in the rehabilitation of people who had damages to a hand or an arm, this kind of method is really helpful to make the patient regain confidence in his limb.
Going more into details, we can say that the first glove is composed by three actuators of silicone that are inflated or deflated by a particular pump, positioned on the wrist of the same arm of the glove (the right). The three actuators are glued on the index, on the medium and on the ring finger, so every finger is able to move independently.
The thumb of the glove is stitched to a part of the glove so it stays still in a particular position. Thanks to this, who wears the glove can take things without moving the thumb. This change in the structure of the glove was necessary because the actuator on the thumb made the finger bend in an ineffective way, so it was impossible to pick up thinks with the glove.
Then we have the pump that inflates the 3 actuators. This pump is composed by 5 valves that can obviously inflate 5 actuators. The pump and the actuators are connected by silicon wires and the pump should have been connected to the Arduino. The connection to the Arduino is missing because we didn’t have enough time to work on it, so the pump is controlled wireless by a smartphone using an app.
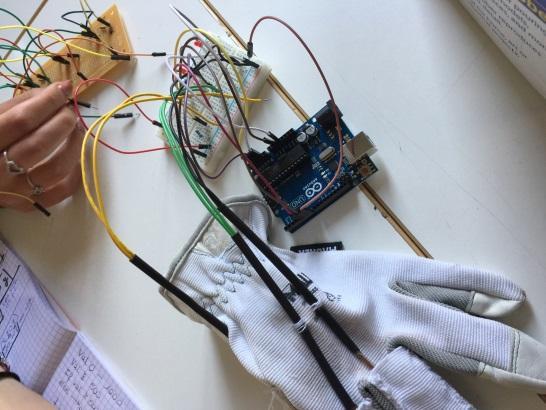
Talking about the other hand (the left) we also used a glove but here we put the flex sensors.
Bending the fingers of this glove a signal detected by the flex sensors would be sent to Arduino which would send the signal to the pump, activating it. Our glove is composed by 3 flex sensors: one on the thumb, one on the index and one on the medium. We need to move the first one on the ring finger because as I said before, the thumb (right now) isn’t supposed to move so it doesn’t requires any kind of signal from the flex sensors. We should do it soon but due to Coronavirus we can’t go at school ☺.
Anyway, the flex sensors are fixed on the 3 fingers using a system of small pockets stitched by us.
When the fingers move, the flex sensors send the signal to the Arduino that would send it to the pump to start the inflation of a particular finger. Right now this process doesn’t work, so we achieved only to send the signal to Arduino and to turn on an LED to verify the signal.
All in all, our goal biggest goal was and is to use these gloves for rehabilitation, but in general we decided to start working on this project for different reasons. First of all we wanted to study and apply physics and engineering using a different method, then we were also interested in creating something so challenging to help people in need.
- SCIENTIFIC CORPUS
- ARDUINO


It’s a tool for controlling electronics.
Arduino is an open-source electronics platform based on easy-to-use hardware and software. Arduino boards are able to read inputs – light on a sensor, a finger on a button, or a Twitter message – and turn it into an output – activating a motor, turning on an LED, publishing something online. You can tell your board what to do by sending a set of instructions to the microcontroller on the board. To do so you use the Arduino programming language (based on Wiring), and the Arduino Software (IDE), based on Processing.
Solderless Breadboard
Each row (horiz.) of 5 holes are connected
Vertical columns – called power bus are connected vertically


- ACTUATORS
Pneunets Bending Actuators
PneuNets (pneumatic networks) are a class of soft actuator originally developed by the Whitesides Research Group at Harvard. They are made up of a series of channels and chambers inside some silicone. These channels inflate when pressurized, creating motion.
The nature of this motion is controlled by modifying the geometry of the embedded chambers and the material properties of their walls. When a PneuNets actuator is pressurized, expansion occurs in the most compliant (least stiff) regions.
If a PneuNets actuator contains layers of materials with different elastic behavior, one layer will expand more than the more rigid one, we can call the more rigid material the “strain limiting layer”, this technique can be used to achieve useful motions such as bending and twisting.
We were able to achieve this rigid layer using particular molds that consisted in three parts.
6. MATERIALS

- SILICONE

we used 2 types of silicone:
Ecoflex 00-50 (https://www.smooth-on.com/products/ecoflex-00-50/) more resistant, more dense, and resistance to expansion but less lasting. It takes more time to solidify.
Ecoflex 00-30
- ARDUINO
- SIL-POXY GLUE (https://www.smooth-on.com/product-line/sil-poxy/)
7.TOOLS
For our project we used several tools, first of all the computer part was very important. We used arduino with a board to which we attached gamps and resistances, creating electrical circuits that transmitted the information. Then we used all the instruments of the chemistry laboratory: for example, the graduated beakers, to find the volumes of the two silicones, the glass rods, to mix the biphasic components of the silicone, a very sensitive scale, to weigh the contents of the becker, and finally some glass plates to be placed on top of molds, made with the 3D printer, which were used to hold the silicone, with small weights on it, so that they put pressure on the silicone. We also used a vacuum pump. subsequently once the actuators were completed with special glue we attached them to a glove. With small plastic tubes then we connected the actuators to a pump also built with the 3D printer. This pump would then go on to inflate the actuators.


8. RISK ASSESSMENT
(es. https://www.sitesafe.org.nz/guides–resources/practical-safety-advice/risk-control/)
As for the risk, luckily for us we were all in contact with low-risk substances. therefore relatively safe substances, it was enough to simply put into practice the simple precautions of a normal chemistry laboratory since we worked with a chemical silicone, then avoid contact with eyes or sensitive parts, and use gloves to handle it. the places where we worked were school so everyone followed the safety rules that we all cared to follow. our greatest danger was to burn some circuits, because we were not very well-versed but they have always assisted and helped us, and therefore everything has always gone well.
9. HOW IT WAS MADE
STEP 1
Our first approach to the project was a simple prototype made by a balloon and a piece of cardboard; The goal was to make a hand bend (just the closing movement), by inflating the balloon with a manual pump we were able to achieve a small movement. Even if it wasn’t elaborated neither 100% efficient, at the end of the day we understood quite better the functioning of the phenomenon.
STEP 2
We looked for more information, such as the most suitable materials, the theoretical basis, the sizes of the molds and the equipment needed.
STEP 3
- MOLDS
First of all, using the 3D printer we printed a mold for the index finger (INDEX 1) that we found on Tinkercad, but this mold was left out because we changed some measurements regarding the structure.
Secondly, we printed a medium finger mold (MEDIUM 1), with the corrected structure. 
(INDEX 1) (MEDIUM 1)
An actuator consists of 3 parts, as you can see in the image on the right here above: (MEDIUM 1), that have to be combined to obtain the final actuator that is ready to receive the silicone. You have to put together part 2 and part 3 as you can see in the (INDEX 1) image. Make sure that all the cells are centered, and glue them using hot glue (it’s resistant but also easy to remove). Make a very small hole on one of the short sides of the actuator and add a bolt through it. This hole is where the string that connects to the pump will be put.
- SILICONE
After making some research on https://softroboticstoolkit.com/book/pneunets-fabrication , we decided to use silicone Ecoflex 00-50, because it had the right parameters for us.

We looked up how to mix the two different components (part A and part B) of our silicone, on the same website where we bought it, and how to pour it into the mold.
This is how we did it:
- we filled the mold with water to know the amount of silicone we had to put in it.
- we premixed part B for a couple of minutes and then added part A
- after mixing well, we used an instrument similar to the vacuum chamber: a vacuum pump and a glass bell (turning on and off the pump staying between the level 20 and 25 going back and forth for about 5 minutes/ or until the bigger bubbles popped)
- we poured the whole thing in the mold (we filled both the flat part and the other one)
- we vacuumed again as before
- we then let the silicone curing overnight (*)
- we removed the silicone from the stamps and glued the different parts together with Sil-poxy glue. (**)
(*) Curing:
After vacuuming the silicone, we covered the stamps with a plexi sheet and added a couple of small weights on top of it to ensure that the sheet won’t slide. Remember to place the stamp on a flat surface.
(**) How to remove the silicone stamps from the actuator without causing any damage and glue them together: The bottom part is very easy as it is a flat strip of silicone.
For the two parts of the stamp glued together the first thing you have to do is remove the hot glue, using a cutter. Then you can gently pull the two parts and separate them, and remember to unscrew the bolt.
Remember to wear gloves while treating the silicone, otherwise you might ruin it.
So now the silicone is in part 3 (MEDIUM 1). To remove it you can simply use your hands or help yourself with a small flat tool to separate the silicone from the sides of the actuator.
Also use gloves when using the Sil-poxy glue as it is very sticky. With a flat object spread a layer of Sil-poxy on the bottom strip of silicone and then quickly stick on top of it the other part of silicone trying to center it as much as possible. Sil-poxy takes about 15 minutes to solidify.
Use Sil-poxy to glue the string that will be used to connect to the pump.
STEP 4
At this point, we decided to split into 2 groups, to move faster but also so that each group could focus more on their job. One group worked on the Arduino part and the second group worked on the actuators.
- ARDUINO
We got an arduino and programmed it to recognize the angle we obtained by bending our flex sensors. We were able to notice that we didn’t have errors in the code and it showed the different values depending on how much we bended it.
Our idea is to then place the flex sensors on a glove and connect the arduino together with the pump that will inflate and deflate the silicone stamps.

- ACTUATORS
Up to this point we had 2 actuators, INDEX 1 and MEDIUM 1.
We tried to inflate them and the results were negative: INDEX 1 had a hole, MEDIUM 1 didn’t, but the pump wasn’t powerful enough to make the actuator bend.
So, we decided to use another type of silicone, Ecoflex 00-30.
FOTO
We also modified the size of the stamps and added a strip of metal inside the bottom part of the actuator stamp to make the actuator thinner and therefore lighter, so that the power of our pump was able to bend it, and printed new ones for both the index and medium finger.
STEP 5
Until now, we were using a manual pump, the one you use to measure your blood pressure, but when the Americans from M.I.T. came they let us use one of their pumps. This pump is controlled by an app which can be installed on a smartphone.
STEP 6
There’s just one thing left that we need to talk about: the gloves. They have some requirements:
- you have to be able to sew on them, to make some small pockets where to put the flex sensors on the glove for healthy hand.
- they have to be easy to bend but also resistant, because the glove for the ill hand is the one where to attach the actuators. We attached the actuators using the Sil-poxy glue.

Problems and how we solved them:
The problems we had were mainly based on the electronic components of our project.
In our group nobody had a great knowledge about electronics, we had never even seen an arduino, LEDs nor the arduino programming language, so this has been a huge problem, that we were able to overcome doing a little bit of research on the internet and thanks to the help of the american guys who really helped us, and taught us the main concepts.
A second problem we had to face was on the kind of silicone we bought, we ordered an Eco-flex 00-50 that then resulted too strong, too resistant and therefore we weren’t able to have the correct bending action that we wanted. We then understood that the best type of silicone for our particular project was the Eco-flex 00-30 that the Spanish guys were so kind to give us in short notice, so that we were able to finish our project in time for the presentation.
Another problem was that when we printed the first 2 actuators (index and medium) and we tried to inflate them with a pump to see how much they would bend it has been a failure since the actuators were too thick and heavy for the pump. We couldn’t use a stronger pump because we only had that one, so besides changing the type of silicone we also modified the size of the stamps and added a strip of metal inside the bottom part of the actuator stamp to make the actuator thinner and therefore lighter, so that the power of our pump was able to bend it, and printed new actuators for both the index and medium finger.
Mechanics hand
Team mission: Gain knowledge through teamwork.Develop a working project.Have fun.Challenge ourselves by approaching them+es which are new for us. Help people with our project.
INTRODUCTION AND DESCRIPTION OF THE PROJECT
the objective is to control the movement of closing and opening of the hand.
The moviment is controll by arduino, who is in charge to move a piston that pushes the haywairs and the fingers can be move.
Project structure ( Components)
- The hand and its movements & Mobility of the wrist (stifness)
Nicolò Moretto;
- mechanic and Electronics (data elaboration)
Francesco Tecchio, Anna Scaramuzza.
Materials:
steel wire, arduino, a glove, a piston, straws, capes for cover the fingers.
Minimum,maximum and obtainable goals
Minimum goal: We want the planned system to work, so the hand should at least make people able to grab things.
Maximum goal: it can be used for rehab.
Why do you want to carry out this project?
We want to have fun approaching Physics in a different way, gaining new abilities and enjoying the opportunity to help people in need.



